竞争条件
协同进程可能共享一些彼此都能够读写的公用存储区(例如打印机脱机系统),也可能是一些共享文件,当两个或多个进程读写某些共享数据,而最后的结果却取决于进程运行的精确时序,就称为竞争条件(race condition)。
如果程序之间有竞争条件,也许大部分的运行结果都很好,但在极少数情况下会发生一些难以解释的事情。
互斥(mutual exclusion)
要避免这种错误,关键是要找出某种途径防止多个进程在使用一个共享变量或文件时,其他进程不能做同样的事。
互斥的实现有很多种,在UNIX编程中,总体来说有两种大的方案:
- 忙等待形式的互斥
- 优势在于被等待的进程(线程)不需要context switch(no extra overhead),提高了效率
- 但若等待时间较长,会浪费CPU资源。
- 会造成优先级反转问题(priority inversion problem)
- 睡眠等待
- CPU利用率较高,但会造成context switch的overhead。
临界区
把对共享内存进行访问的程序片段称为临界区或者临界段(critical region)。
如果能够进行适当安排,使得两个进程不可能同时处于临界区,则能够避免竞争条件。
我们认为一个好的方案应该能解决竞争条件的同时,依然高效地进行操作,满足以下四个条件:
- 任何两个进程不能同时处于临界区。
- 不应该对CPU的速度和数目做任何假设。
- 临界区外的进程不得阻塞其他进程。
- 不能使进程在临界区外无休止的等待。
忙等待的互斥
关闭中断
这是最简单也最直接的方案,使得每个进程在进入临界区后先关闭中断,在离开之前再打开中断。
中断被关闭后,时钟中断也会关闭。因此CPU在做完临界区之前都不会发生进程切换。
缺点:
- 把关闭中断的权利交给用户进程是不明智的。可能会造成系统终止。
- 不适用于多CPU情形。
- 在实际中很少采用。
关闭中断对于操作系统是一项很有用的技术,但对于用户进程不是一种合适的通用互斥机制。
锁变量
设想有一个共享锁变量,在进程想要进入临界区时,先测试这把锁。
但可以想象,如果锁变量依然是普通类型(不是原子类型),则依然会发生竞争条件。
严格交替法
首先看示意代码:
/// process 0 ////
while(true){
while(turn!=0);
critical_region();
turn=1;
noncritical_region();
}
/// process 1 ////
while(true){
while(turn!=1);
critical_region();
turn=0;
noncritical_region();
}
process 0 必须在 turn 变量等于0时才会进入临界区,process 1 必须在 turn 变量等于1时才能进入临界区。
假设turn变量初始化为0,则process 1会一直持续地检测一个变量,直到为1才执行下面的代码。这种等待为忙等待。一个适用于忙等待的锁称为自旋锁(spin lock)。
仔细观察以上代码,两个进程互相依靠对方提供的turn变量才能继续下去。若一个进程的noncritical_region() 很长,另一个必须等它完成后才停止while循环。因此,即使其代码在非临界区中,也会阻塞其他进程。
因此,该方案违反了条件3:进程被一个临界区之外的进程阻塞,所以不能作为一个很好的方案。
peterson解法
结合了锁变量和轮换法的思想:
#define N 2
#define FALSE 0
#define TRUE 1
int turn;
int interest[N]={FALSE};//所有值初始为0
void enter_region(int process){
interest[process] = TRUE;
turn = process;
int other = 1-process;
while(turn == process && interest[other] == TRUE);
}
void leave_region(int process){
interest[process] = FALSE;
}
我们主要关注enter_region可能发生的情况:
- 一个进程进入后,没有进程中断它,那么一直执行,不会发生空转;
- 若在
turn = process;之后执行了下一个线程,那么下一个线程不会空转,直接执行;
可以这样理解条件判断语句:
- 若
turn == process不满足,则说明另一个进程一定处于等待中(本进程的interest为TRUE),因此可以进入临界区。 - 若
turn == process满足而interest[other] == TRUE不满足,则说明这时候没有其他进程在等待进入,因此可以进入临界区。
TSL上锁
如果能有一种硬件解决方案,使得我们拿到了变量值,就不间断的更改这个值(原子操作),那将会是更有效的方法。
现在的计算机都支持这种方式,并有一个特殊的指令TSL。
TSL RX, LOCK
将一个存储器字读到寄存器中,然后在该内存的地址上存一个非零值。
读数和写数操作保证是不可分割的,即该指令结束之前其他处理机均不允许访问该存储器字。
使用这条指令来防止两个进程进入临界区的方案如下:
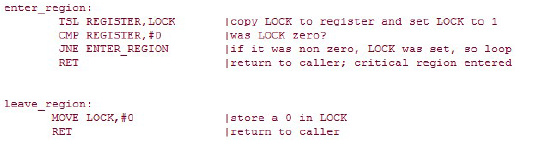
程序将LOCK原来的值复制到寄存器中,并将LOCK值置为1,随后这个原先的值与0比较。若非0,则说明之前已经上锁,从而程序一直空转。
并且,在现代操作系统中规定,拿到锁的进程即使没有时间片也要立即执行,这样会防止CPU的效率进一步下降。
优先级反转问题
例如H进程优先级高,L进程优先级低 ,假设L处于临界区中,H这时转到就绪态想进入临界区,H需要忙等待直到L退出临界区,但是H就绪时L不能调度,L由于不能调度无法退出临界区,所以H永远等待下去。
因此,我们想知道,是否有其他方法,既能使CPU效率提高,也能解决优先级反转问题。
睡眠等待
考虑通信原语(primitive):sleep 和 wakeup。
- sleep系统调用会引起进程阻塞,直到另一进程将其唤醒。
- wakeup调用即将被唤醒的进程。
生产者消费者问题
两个进程共享一个公共的固定大小的缓冲区,其中一个是生产者,负责将信息放入缓冲区;一个是消费者,负责从缓冲区中读取信息。但如果我们使用常规的count变量记录缓冲区数量时,还是会出现两个进程永远睡眠的情况:
#define N 100
int count = 0;
void producer(void)
{
int item;
while(TRUE)
{
item = produce_item();
if(count == N) //如果缓冲区满就休眠
sleep();
insert_item(item);
count = count + 1; //缓冲区数据项计数加1
if(count == 1)
wakeup(consumer);
}
}
void consumer(void)
{
int item;
while(TRUE)
{
if(count == 0) //如果缓冲区空就休眠
sleep();
item = remove_item();
count = count - 1; //缓冲区数据项计数减1
if(count == N - 1)
wakeup(producer);
consume_item(item);
}
一种解决方案是增加一个唤醒等待位,当一个清醒的进程发送一个唤醒信号时,将该位置设为1;当程序要睡眠时,如果唤醒等待位为1,则清零,但不会睡眠。
信号量
引入一个整型变量来累计唤醒次数,称为信号量(semaphore)。一个信号量为非负数。
常用的为binary semaphore:down 和 up。
- down 操作是检查其值是否大于0,若为真,则减一,若为0,则进程将睡眠,并且,检查数值,改变数值以及可能发生的睡眠操作是单一的原子操作(atomic action)。
- up 操作是递增信号量的值。对于一个进程,若有睡眠的进程,则信号量执行一次up操作后,信号量依然为0,但在其上的睡眠进程减少一个(唤醒一个)。
#define N 100
typedef int semaphore;
semaphore mutex = 1;
semaphore empty = N;
semaphore full = 0;
void producer(void)
{
int item;
while(TRUE)
{
item = produce_item();
down(&empty); //空槽数目减1,相当于P(empty)
down(&mutex); //进入临界区,相当于P(mutex)
insert_item(item); //将新数据放到缓冲区中
up(&mutex); //离开临界区,相当于V(mutex)
up(&full); //满槽数目加1,相当于V(full)
}
}
void consumer(void)
{
int item;
while(TRUE)
{
down(&full); //将满槽数目减1,相当于P(full)
down(&mutex); //进入临界区,相当于P(mutex)
item = remove_item(); //从缓冲区中取出数据
up(&mutex); //离开临界区,相当于V(mutex)
up(&empty); //将空槽数目加1 ,相当于V(empty)
consume_item(item); //处理取出的数据项
}
}
我们使用两种不同的方法来使用信号量。
- 信号量mutex用于互斥。保证任意时刻只有一个进程读写缓冲区和相关的变量
- 信号量full与empty用于保证一定的事件顺序发生或不发生。用于同步。
互斥(mutex)
若不需要信号量的计数能力,可以用于互斥:是一个处于两种变量之间(解锁和加锁)的变量。
适用于两个过程:
- 当一个进程需要进入临界区时,调用mutex_lock,如果此时互斥是解锁的,那么调用进程可以进入临界区。
- 若该互斥已经加锁,调用者被阻塞,等待在临界区中的进程完成操作并调用mutex_unlock退出为止。
多线程实现
这里以银行汇款为例子,讲解在竞争条件或互斥下的不同状态。若A和B都有10000元,考虑同时汇款的情形(thread1、thread2),我们可以写出以下代码:
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <pthread.h>
int sharedi = 0;
int A = 10000;
int B = 10000;
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
void thread1()
{
int i = 0;
for (i = 0; i < 10; i++)
{
//pthread_mutex_lock(&mutex);
A += 100;
sleep(1);
B -= 100;
printf("thread1: A = %d , B = %d\n", A, B);
//pthread_mutex_unlock(&mutex);
}
}
void thread2()
{
int i = 0;
for (i = 0; i < 10; i++)
{
//pthread_mutex_lock(&mutex);
A += 100;
sleep(1);
B -= 100;
printf("thread2: A = %d , B = %d\n", A, B);
//pthread_mutex_unlock(&mutex);
}
}
int main()
{
int ret;
pthread_t thrd1, thrd2;
ret = pthread_create(&thrd1, NULL, (void *)thread1, NULL);
ret = pthread_create(&thrd2, NULL, (void *)thread2, NULL);
pthread_join(thrd1, NULL);
pthread_join(thrd2, NULL);
return 0;
}
若直接运行,我们会得到很奇怪的答案:
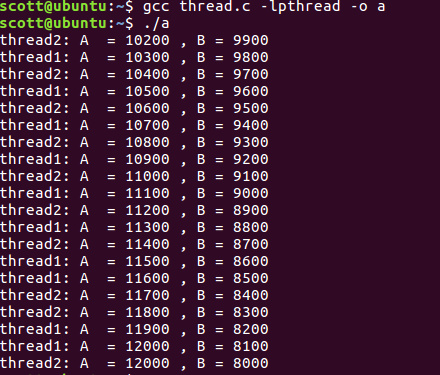
会发现每一次汇款后,钱的总数不再等于20000,因此发生了竞争条件。
我们使用POSIX提供的mutex函数加锁后:
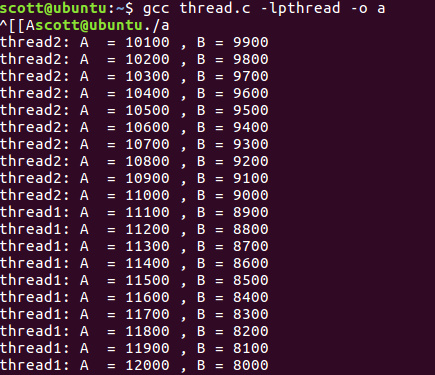
这样就得到了我们想要的答案。