本节将矩阵的特征值与微分方程联系在一起,从另一个角度更好地了解特征值。
在差分方程中的应用
首先回顾由差分方程uk+1=Au]k描述的离散动力系统的长期行为,即k⇒∞时解的性质。
设A可对角化,即存在可逆矩阵S=(x1,...,xn),使得S−1AS=Λ为对角阵。
设S−1u0=(c1,...,cn)T,即u0=c1x1+...+cnxn。
uk=Aku0=SΛkS−1u0=c1λ1kx1+...+cnλnkxn
可以看出,uk的增长因子λik支配,因此系统的稳定性依赖于A的特征值。
当所有特征值∣λi∣<1时,是稳定的;
当所有特征值∣λi∣≤1时,是中性稳定的;
当至少有一个特征值∣λi∣>1时,是不稳定的;
因此,Markov过程是中性稳定的,Fibonacci数列是不稳定的。
引言
设关于t的向量值可导函数u=u(t)=⎝⎜⎜⎜⎜⎛u1(t)....un(t)⎠⎟⎟⎟⎟⎞,满足:
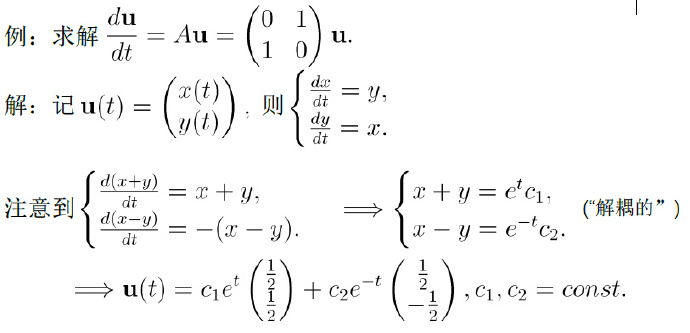
dxdu=Au
其中A=(aij)为n阶常数矩阵,求解u=u(t)
- 若A=⎝⎜⎜⎜⎜⎛λ1...λn⎠⎟⎟⎟⎟⎞为对角阵,
- 则dxdui=λiui
- 因此可解得u=u(t)=⎝⎜⎜⎜⎜⎛eλ1tc1...eλntcn⎠⎟⎟⎟⎟⎞
- 由于每个方程都是独立的,这类方程被称为解耦的(uncoupled)
- 那么对于一般的矩阵A,如何求解呢?
- 可以将非解耦方程转化为解耦方程求解
A可对角化情形
设dtdu=Au有形如eλtx的解(为什么要这样假设?),其中λ为数,x为向量,则:
设u=u1(t)和u=u2(t)是齐次线性微分方程组dtdu=Au的解,则他们的线性组合u=c1u1(t)+c2u2(t)也是此方程组的解,其中c1和c2是任意常数。
dtdu=An×nu的解集是一个n维向量空间。
- 若A可对角化,则方程组的通解为u(t)=c1eλ1tx1+...+cneλntxn
A不可对角化时
若A不可对角化,设GM(λ)<AM(λ)。若有相同n个λ,只有一个特征向量,则这个特征值对应的解为:c1eλtx+....+cntn−1eλtx。
矩阵的指数函数
回顾ex=1+x+2!x2+...+n!xn+...
因此可使用eAx带入,可得:
dtd(eAt)=AeAt
而我们需要求的微分方程组dtdu=Au,因此u(t)=eAtu(0)。
矩阵的指数函数性质:
- 若Λ=⎝⎜⎜⎜⎜⎛λ1...λn⎠⎟⎟⎟⎟⎞, 则eΛt=⎝⎜⎜⎜⎜⎛eλ1t...eλnt⎠⎟⎟⎟⎟⎞
- 若AB=BA,则eA+B=eA⋅eB,特别的,(eA)−1=e−A。
- 若存在可逆矩阵P,使得A=PBP−1,则eAt=PeBtP−1。
因此,若A可对角化,由定理一可知:
u(t)=eAtu(0)=SeΛtS−1u(0)=(x1,...,xn)⎝⎜⎜⎜⎜⎛eλ1t...eλnt⎠⎟⎟⎟⎟⎞⎝⎜⎜⎜⎜⎛c1...cn⎠⎟⎟⎟⎟⎞
=c1eλ1tx1+...+cneλntxn
A二阶常系数线性微分方程
假设eλt是方程的解,则可以得特征方程,
若λ1,λ2为实数,则方程的通解为:
y=c1eλ1t+c2eλ2t
若λ1,λ2为共轭负数,即λ1=α+iβ,λ2=α−iβ,则方程的通解为:
y=eαt(c1cosβt+c2sinβt)
也可以使用矩阵表示为dxdu=Au。
若A有相同特征值,则不能对角化(为什么?),可使用第一种方法,但要注意,若有n重根,则解为t0eλt,....,tn−1eλt。
微分方程的稳定性
我们知道若A可对角化,则dxdu=Au有通解:
u(t)=c1eλ1tx1+...+cneλntxn
若所有的实数λi<0,则解是稳定的;
若所有的实数λi≤0,则解是中性稳定的;
若至少有一个的实数特征值λi<0,则解是不稳定的